
A l’issue de l’acquisition et des traitements des données photogrammétriques, nous disposons de nuages de points denses de différentes zones du plan-relief ainsi que de maillages des îlots urbains. La figure 1 décrit le processus de cette phase en utilisant le formalisme BPMN.
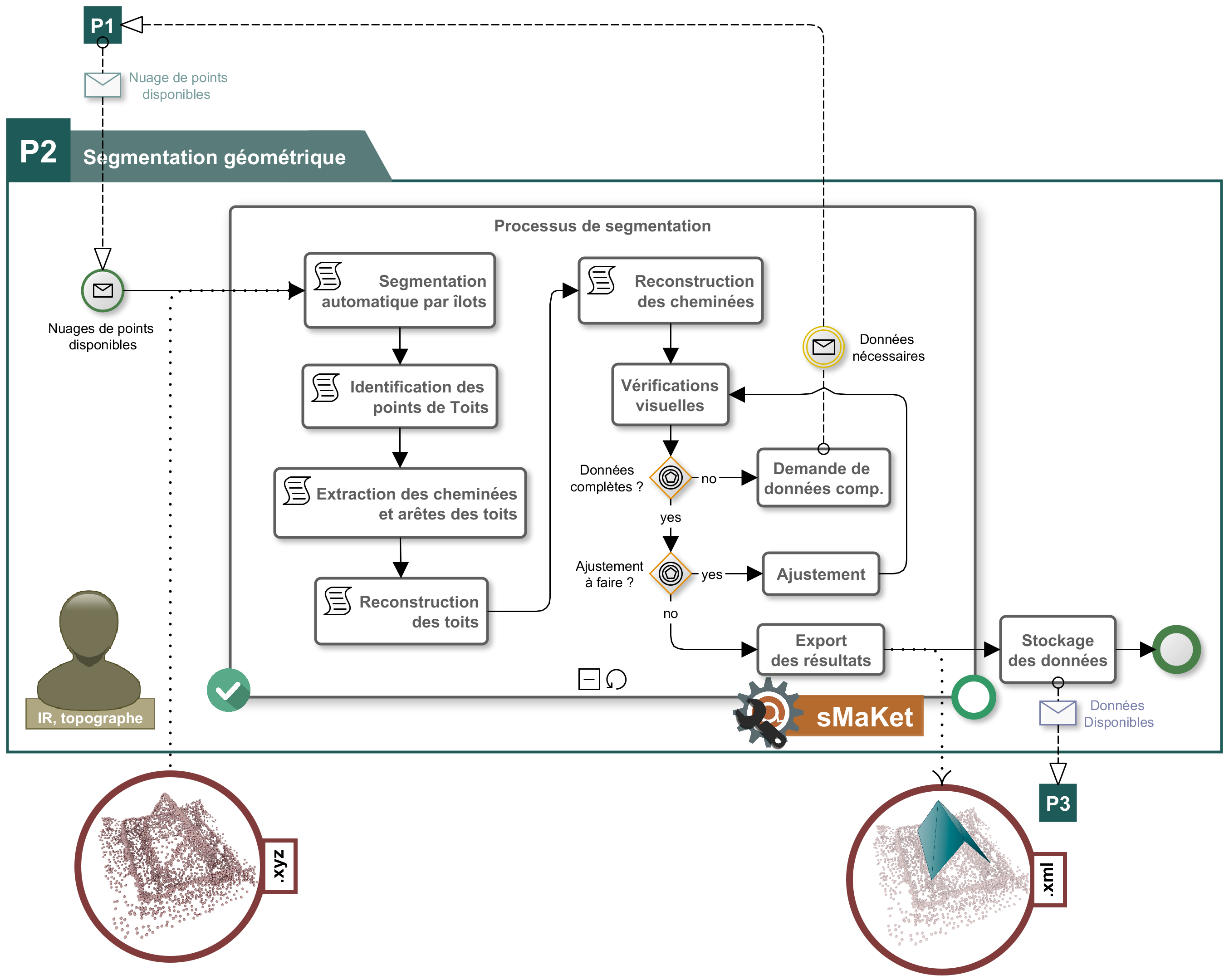
Figure 1 : Processus BPMN de la phase (2) de segmentation du nuage de points.
Afin de réaliser la modélisation 3D paramétrique de la ville, il est nécessaire de disposer des polygones décrivant les plans des toits et les emprises des cheminées. Nous avons développé une chaîne de traitements permettant d’extraire automatiquement ces informations des nuages de points. Ces développements ont fait l’objet d’une publication et d’une présentation orale lors de la conférence du CIPA 2017 (http://www.cipaottawa.org).
1. Segmentation des îlots urbains
La première étape consiste à segmenter le nuage de points en îlots urbains. Pour ce faire, le sol est d’abord extrait à l’aide d’un filtre utilisé à l’origine pour l’extraction des sols de nuages de points issus d’acquisitions au LiDAR aérien. Puis, dans un second temps, une analyse en composantes connexes est réalisée afin de séparer les éléments spatialement distincts dans le nuage des points hors sol.

Segmentation du nuage de points en îlots urbains
Cette méthode ne permet pas de segmenter tous les îlots. En effet, certains îlots ne sont pas spatialement séparés et il peut y avoir du bruit dans le nuage de points entre deux îlots très proches. Cependant, la méthode proposée permet déjà d’extraire 60 % des îlots automatiquement.
2. Identification des points appartenant aux toits
A l’échelle du nuage de points d’un îlot et du sol environnant, la deuxième étape de la chaîne de traitements consiste à identifier les points appartenant aux toits. Le sol est d’abord extrait en segmentant un plan horizontal et retiré du nuage de points. L’extraction des plans de façades est ensuite considérée. Une image binaire est générée en considérant la projection des points sur le plan horizontal. Les contours de cette image permettent d’identifier les points appartenant aux façades. Une segmentation en plans est finalement effectuée pour extraire les différents plans de façades. Les points appartenant aux plans de façades sont retirés du nuage et il ne reste donc plus que les points appartenant aux toits.
3. Extraction des cheminées et des arêtes de toits
Afin d’extraire à la fois les cheminées et les arêtes de toits, le nuage de points des toits a été subdivisé en couches selon la hauteur. Le principe est d’étudier chaque couche du haut vers le bas. En ce qui concerne les cheminées, les éléments spatialement séparés sont identifiés dans chaque couche. Un ensemble de critères a été mis en place pour déterminer si ces éléments appartiennent à des cheminées (nombre de points, largeur, longueur, rapport entre longueur et largeur). A partir des éléments respectant les critères imposés, une croissance de région 3D permet d’obtenir un nuage de points par cheminée. La méthode d’extraction des cheminées a été validée à l’aide de 6 îlots différents. Pour un total de 109 cheminées, 98% ont été extraits automatiquement.
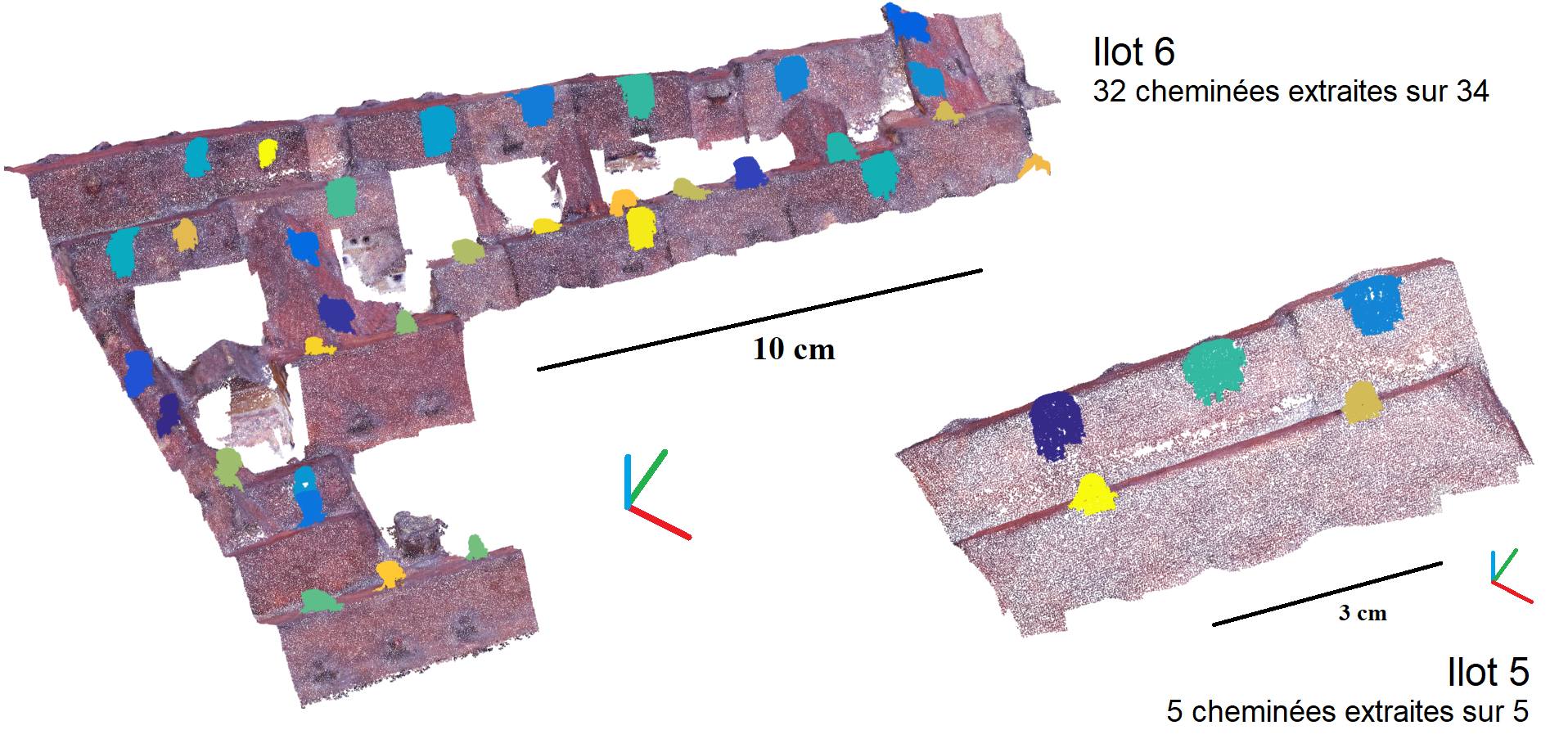 Segmentation des cheminées (une couleur par cheminée) – Ilots 5 et 6
Segmentation des cheminées (une couleur par cheminée) – Ilots 5 et 6
Les cheminées sont retirées du nuage de points des toits et les couches sont à nouveau analysées pour extraire les arêtes des toits. La couche du haut est sélectionnée et les éléments linéaires sont détectés dans le nuage de points de celle-ci. Ces éléments sont supposés être des arêtes de toits. Pour le vérifier, plusieurs critères sont pris en compte : le nombre de points de la ligne, l’écart-type des distances points-ligne et la longueur de l’élément linéaire. Pour chaque arête identifiée, deux plans sont ensuite extraits de part et d’autre de l’arête. Chaque couche est analysée afin d’extraire toutes les arêtes se trouvant à des hauteurs différentes.
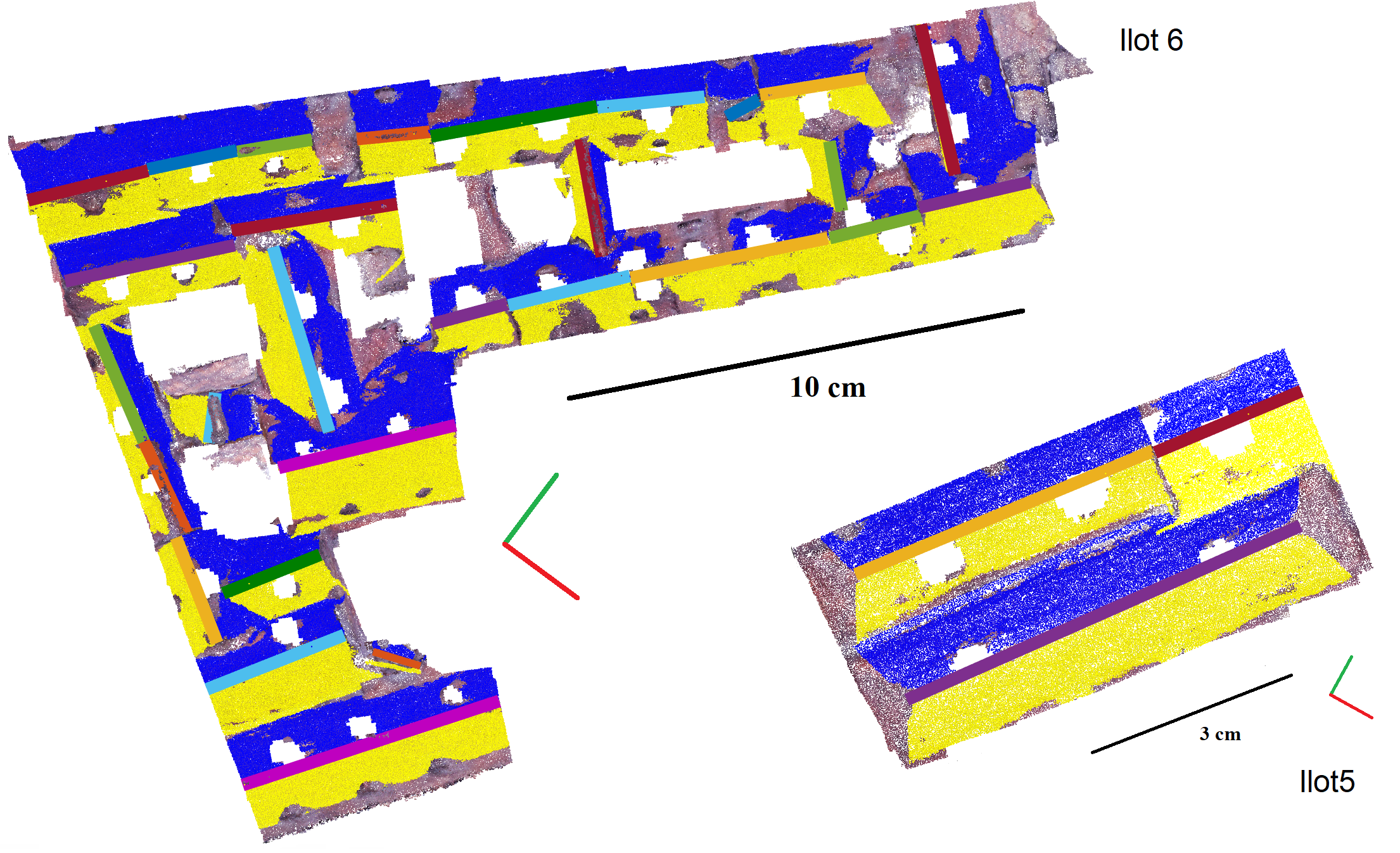
Extraction des arêtes (une couleur par arête) et segmentation des plans des toits (nuages en jaune et bleu), vue de dessus – Ilots 5 et 6
4. Exploitation des résultats pour la modélisation 3D paramétrique des îlots urbains
À l’heure actuelle, la chaîne de traitements automatique présentée permet d’extraire les nuages de points des cheminées et les arêtes et plans des toits. La modélisation 3D paramétrique nécessite de disposer en entrée des polygones décrivant les toits et le haut des cheminées. Une méthode de reconstruction est en cours de développement. Celle-ci consiste à ajuster un rectangle pour chaque cheminée et à réaliser des intersections de plans pour les toits.
Les développements de chaînes de traitements automatiques pour l’extraction des éléments des toits et pour la modélisation 3D paramétrique ont été effectués en parallèle. Afin de pouvoir tester et développer l’étape automatique de modélisation paramétrique, une interface graphique a été développée pour dessiner sur le maillage d’un îlot les polygones nécessaires à la modélisation. Pour l’îlot 6, il faut environ 8 heures de travail pour dessiner correctement les polygones. Le dessin manuel est chronophage en raison de la qualité du maillage dans certaines parties telles que de petites cours ou des rues étroites. Les bords arrondis rendent difficile l’estimation de la position correcte des points. Les résultats de la détection automatique des polygones des toits nécessiteront probablement quelques corrections manuelles (ajout, suppression ou modification de polygones) mais l’extraction automatique des polygones des toits permettra d’économiser du temps et sera beaucoup plus précise.
Article rédigé par Hélène Macher, post-doctorante, laboratoire iCube.